11.3D数学-Quaternion四元数-四元数是什么
11.1 知识点

知识回顾
主要学习内容
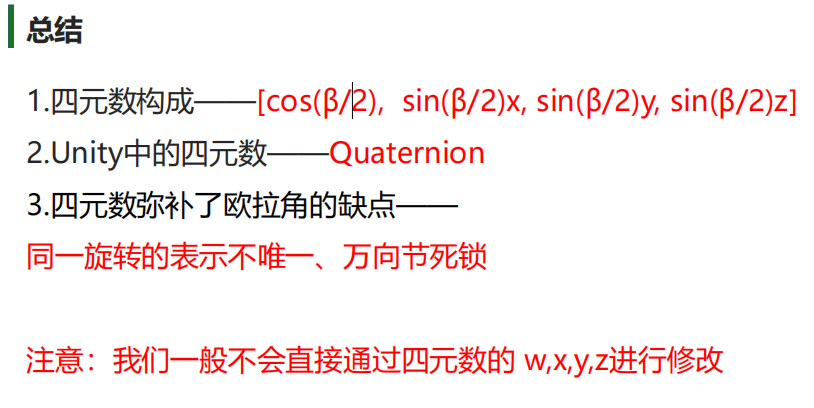
四元数构成
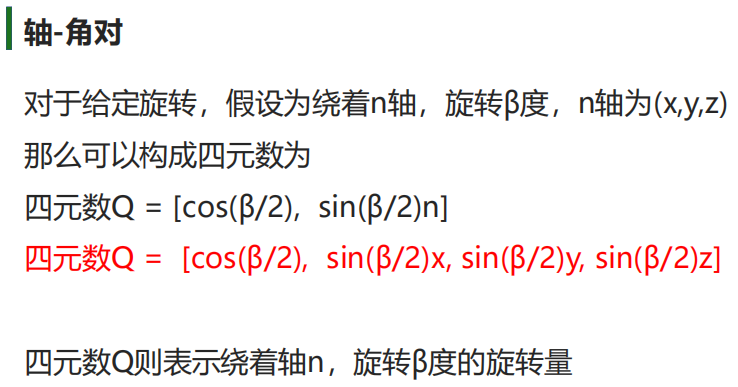
轴角对
Unity中的四元数 Quaternion
四元数由一个向量(x,y,z)和要旋转的角度β通过数学运算构成。
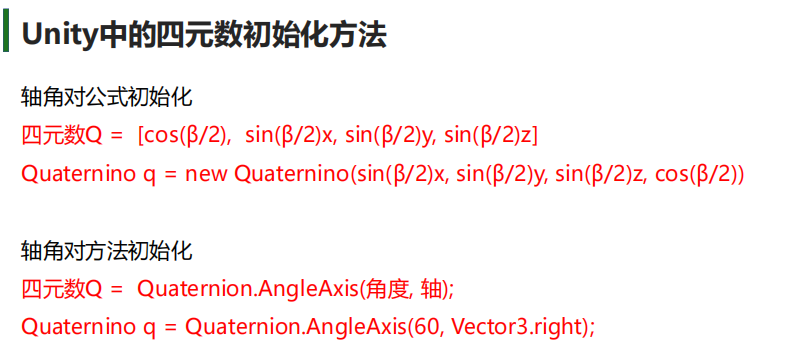
四元数Q = [cos(β/2), sin(β/2)x, sin(β/2)y, sin(β/2)z]
Quaternion的构造函数 初始化四元数
//用四元数的计算原理 绕着(x,y,z)向量旋转β度 要传入弧度制 角度转弧度
//Quaternion q = new Quaternion(Mathf.Sin(β/2 * Mathf.Deg2Rad)*x, Mathf.Sin(β/2 * Mathf.Deg2Rad)*y, Mathf.Sin(β/2 * Mathf.Deg2Rad)*z, Mathf.Cos(β/2 * Mathf.Deg2Rad));
//绕着(1,0,0)向量旋转60度 要传入弧度制 角度转弧度
Quaternion q1 = new Quaternion(Mathf.Sin(30 * Mathf.Deg2Rad), 0, 0, Mathf.Cos(30 * Mathf.Deg2Rad));
AngleAxis静态方法 绕着某一个向量旋转多少度
AngleAxis静态方法用于创建一个围绕轴向量旋转指定角度的四元数。
//创建一个围绕 axis 旋转 offsetAngle 度的旋转。
//提供的轴角对 初始化 四元数的方法 分别传入度数和向量轴
Quaternion q2 = Quaternion.AngleAxis(60, Vector3.right);
创建一个立方体演示
GameObject obj = GameObject.CreatePrimitive(PrimitiveType.Cube);
obj.transform.rotation = q2;
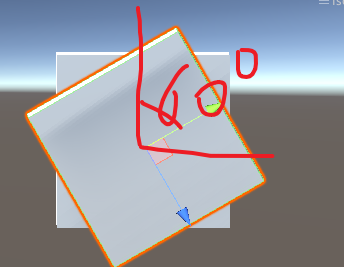
绕x轴转的话,逆着x轴看是顺时针
四元数和欧拉角相互转化
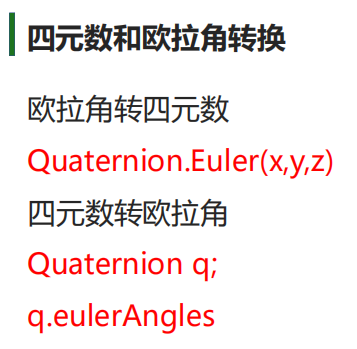
Euler静态方法 把欧拉角转成四元数
Euler静态方法用于将欧拉角转换为四元数。
//返回一个旋转,它围绕 z 轴旋转 z 度、围绕 x 轴旋转 x 度、围绕 y 轴旋转 y 度(按该顺序应用)。
//直接传入欧拉角xyz轴旋转的角度即可
Quaternion q3 = Quaternion.Euler(60, 0, 0);
GameObject obj2 = GameObject.CreatePrimitive(PrimitiveType.Cube);
obj2.transform.rotation = q3;
eulerAngles变量 把四元数转成欧拉角
eulerAngles变量用于获取或设置四元数的欧拉角表示。
//返回或设置旋转的欧拉角表示。
Quaternion q4 = Quaternion.Euler(60, 0, 0);
print(q4.eulerAngles);//(60.0, 0.0, 0.0)
四元数弥补的欧拉角缺点
- 注意:一个四元数a乘了另一个四元数b,a按照四元数b旋转了
把示例立方体x轴旋转90度造成万向节死锁
四元数旋转不会造成万向节死锁
//*=四元数就代表绕着四元数的轴旋转度数了
//每一帧绕着y轴旋转1度
exampleCube.transform.rotation *= Quaternion.AngleAxis(1, Vector3.up);//四元数绕y轴转
//就算把示例立方体x轴旋转90度造成万向节死锁 也可以绕着自身的y轴顺时针转
//注意: 这里虽然传入Vector3.up,但是还是以本地坐标系计算
欧拉角造成万向节死锁
//欧拉角添加y轴或z轴旋转都只能绕z轴旋转 会造成万向节死锁
Vector3 eulerAngles;
eulerAngles = exampleCube.transform.rotation.eulerAngles;
//eulerAngles += Vector3.up;//想欧拉角绕y轴转 但还是绕着z轴转
eulerAngles += Vector3.forward;//欧拉角绕z轴转
//转的欧拉角返回成四元数赋值给示例立方体
exampleCube.transform.rotation = Quaternion.Euler(eulerAngles);
总结
11.2 知识点代码
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class Lesson11_3D数学_Quaternion四元数_四元数是什么 : MonoBehaviour
{
public GameObject exampleCube;
void Start()
{
#region 知识点一 Unity中的四元数 Quaternion
//四元数由一个向量(x,y,z)和要旋转的角度β通过数学运算构成 如下
//四元数Q = [cos(β/2), sin(β/2)x, sin(β/2)y, sin(β/2)z]
//Quaternion的构造函数初始化四元数
//用四元数的计算原理 绕着(x,y,z)向量旋转β度 要传入弧度制 角度转弧度
//Quaternion q = new Quaternion(Mathf.Sin(β/2 * Mathf.Deg2Rad)*x, Mathf.Sin(β/2 * Mathf.Deg2Rad)*y, Mathf.Sin(β/2 * Mathf.Deg2Rad)*z, Mathf.Cos(β/2 * Mathf.Deg2Rad));
//绕着(1,0,0)向量旋转60度 要传入弧度制 角度转弧度
Quaternion q1 = new Quaternion(Mathf.Sin(30 * Mathf.Deg2Rad), 0, 0, Mathf.Cos(30 * Mathf.Deg2Rad));
//AngleAxis静态方法 绕着某一个向量旋转多少度 返回一个四元数
//创建一个围绕 axis 旋转 offsetAngle 度的旋转。
//提供的轴角对 初始化 四元数的方法 分别传入度数和向量轴
Quaternion q2 = Quaternion.AngleAxis(60, Vector3.right);
//创建一个立方体演示
GameObject obj = GameObject.CreatePrimitive(PrimitiveType.Cube);
obj.transform.rotation = q2;
#endregion
#region 知识点二 四元数和欧拉角转换
//Euler静态方法 把欧拉角转成四元数
//返回一个旋转,它围绕 z 轴旋转 z 度、围绕 x 轴旋转 x 度、围绕 y 轴旋转 y 度(按该顺序应用)。
//直接传入欧拉角xyz轴旋转的角度即可
Quaternion q3 = Quaternion.Euler(60, 0, 0);
GameObject obj2 = GameObject.CreatePrimitive(PrimitiveType.Cube);
obj2.transform.rotation = q3;
//eulerAngles变量 把四元数转成欧拉角
//返回或设置旋转的欧拉角表示。
Quaternion q4 = Quaternion.Euler(60, 0, 0);
print(q4.eulerAngles);//(60.0, 0.0, 0.0)
#endregion
}
void Update()
{
#region 知识点三 四元数弥补的欧拉角缺点
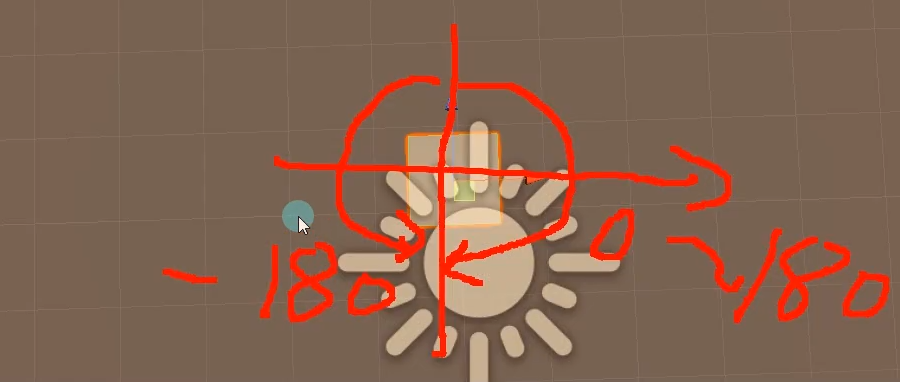
//1.同一旋转的表示不唯一 四元数旋转后 转换后的欧拉角 始终是 -180~180度
//2.万向节死锁 通过四元数旋转对象可以避免万向节死锁
//把示例立方体x轴旋转90度造成万向节死锁
//四元数旋转不会造成万向节死锁
//*=四元数就代表绕着四元数的轴旋转度数了
//每一帧绕着y轴旋转1度
exampleCube.transform.rotation *= Quaternion.AngleAxis(1, Vector3.up);//四元数绕y轴转
//就算把示例立方体x轴旋转90度造成万向节死锁 也可以绕着自身的y轴转
//注意: 这里虽然传入Vector3.up,但是还是以本地坐标系计算
//欧拉角添加y轴或z轴旋转都只能绕z轴旋转 会造成万向节死锁
Vector3 eulerAngles;
eulerAngles = exampleCube.transform.rotation.eulerAngles;
//eulerAngles += Vector3.up;//想欧拉角绕y轴转 但还是绕着z轴转
eulerAngles += Vector3.forward;//欧拉角绕z轴转
//转的欧拉角返回成四元数赋值给示例立方体
exampleCube.transform.rotation = Quaternion.Euler(eulerAngles);
#endregion
}
}
转载请注明来源,欢迎对文章中的引用来源进行考证,欢迎指出任何有错误或不够清晰的表达。可以在下面评论区评论,也可以邮件至 785293209@qq.com

