62.3D动画-动画IK控制
62.1 知识点
什么是IK
- 在骨骼动画中,构建骨骼的方法被称为正向动力学,它的表现形式是,子骨骼(关节)的位置根据父骨骼(关节)的旋转而改变。
- 用我们人体举例子,当我们抬起手臂时,是肩部关节带动的整个手臂的运动,用父子骨骼理解的话就是父带动了子。
- 而IK全称是Inverse Kinematics,翻译过来的意思就是反向动力学的意思,它和正向动力学恰恰相反,它的表现形式是,子骨骼(关节)末端的位置改变会带动自己以及自己的父骨骼(关节)旋转。
- 用我们人体举例子,当我们拿起一个杯子的时候是用手掌去拿,以杯子为参照物,我们移动杯子的位置,手臂会随着杯子一起移动。用父子骨骼理解的话就是子带动了父。
如何进行IK控制
在状态机的层级设置中开启 IK 通道。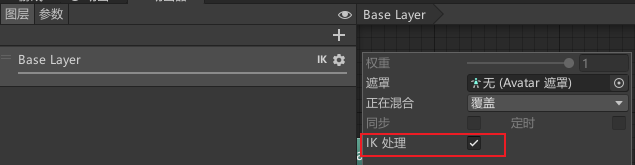
继承MonoBehaviour的类中,Unity定义了一个IK回调函数:OnAnimatorIK,我们可以在该函数中调用Unity提供的IK相关API来控制IK。
private void OnAnimatorIK(int layerIndex)
{
// 在这里进行IK控制的代码
}
Animator中的IK相关API:
// 设置头部IK权重
animator.SetLookAtWeight(1, 1f, 1f);
// 设置头部IK看向位置
animator.SetLookAtPosition(pos.position);
// 设置IK位置权重
animator.SetIKPositionWeight(AvatarIKGoal.RightFoot, 1);
// 设置IK旋转权重
animator.SetIKRotationWeight(AvatarIKGoal.RightFoot, 1);
// 设置IK对应的位置
animator.SetIKPosition(AvatarIKGoal.RightFoot, pos2.position);
// 设置IK对应的角度
animator.SetIKRotation(AvatarIKGoal.RightFoot, pos2.rotation);
IK反向动力学控制对于我们的意义
- IK在游戏开发中的应用。
- 拾取某一件物品。
- 持枪或持弓箭瞄准某一个对象等。
关于OnAnimatorIK和OnAnimatorMove两个函数的理解
- 我们可以简单理解这两个函数是两个和动画相关的特殊生命周期函数,它们在Update之后LateUpdate之前调用,会在每帧的状态机和动画处理完后调用。
- OnAnimatorIK在OnAnimatorMove之前调用,主要处理IK运动相关逻辑
- OnAnimatorMove主要处理动画移动以修改根运动的回调逻辑。
- 他们存在的目的只是多了一个调用时机,当每帧的动画和状态机逻辑处理完后再调用
62.2 知识点代码
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class Lesson62_3D动画_动画IK控制 : MonoBehaviour
{
private Animator animator;
public Transform pos;
public Transform pos2;
void Start()
{
#region 知识点一 什么是IK?
//在骨骼动画中,构建骨骼的方法被称为正向动力学
//它的表现形式是,子骨骼(关节)的位置根据父骨骼(关节)的旋转而改变
//用我们人体举例子
//当我们抬起手臂时,是肩部关节带动的整个手臂的运动,用父子骨骼理解的话就是父带动了子
//而IK全称是Inverse Kinematics,翻译过来的意思就是反向动力学的意思
//它和正向动力学恰恰相反
//它的表现形式是,子骨骼(关节)末端的位置改变会带动自己以及自己的父骨骼(关节)旋转
//用我们人体举例子
//当我们拿起一个杯子的时候是用手掌去拿,以杯子为参照物,我们移动杯子的位置,手臂会随着杯子一起移动
//用父子骨骼理解的话就是子带动了父
#endregion
#region 知识点二 如何进行IK控制
//1.在状态机的层级设置中 开启 IK 通道
//2.继承MonoBehaviour的类中
// Unity定义了一个IK回调函数:OnAnimatorIK
// 我们可以在该函数中调用Unity提供的IK相关API来控制IK
//3.Animator中的IK相关API
// SetLookAtWeight 设置头部IK权重
// SetLookAtPosition 设置头部IK看向位置
// SetIKPositionWeight 设置IK位置权重
// SetIKRotationWeight 设置IK旋转权重
// SetIKPosition 设置IK对应的位置
// SetIKRotation 设置IK对应的角度
// AvatarIKGoal枚举 四肢末端IK枚举
animator = this.GetComponent<Animator>();
#endregion
#region 知识点三 IK反向动力学控制对于我们的意义
//IK在游戏开发中的应用
//1.拾取某一件物品
//2.持枪或持弓箭瞄准某一个对象
//等等
#endregion
#region 知识点四 关于OnAnimatorIK和OnAnimatorMove两个函数的理解
//我们可以简单理解这两个函数是两个和动画相关的特殊生命周期函数
//他们在Update之后LateUpdate之前调用
//他们会在每帧的状态机和动画处理完后调用
//OnAnimatorIK在OnAnimatorMove之前调用
//OnAnimatorIK中主要处理 IK运动相关逻辑
//OnAnimatorMove主要处理 动画移动以修改根运动的回调逻辑
//他们存在的目的只是多了一个调用时机,当每帧的动画和状态机逻辑处理完后再调用
#endregion
}
private void OnAnimatorIK(int layerIndex)
{
#region 知识点二 如何进行IK控制
// SetLookAtWeight 设置头部IK权重
// SetLookAtPosition 设置头部IK看向位置
// SetIKPositionWeight 设置IK位置权重
// SetIKRotationWeight 设置IK旋转权重
// SetIKPosition 设置IK对应的位置
// SetIKRotation 设置IK对应的角度
// AvatarIKGoal枚举 四肢末端IK枚举
//Animator的SetLookAtWeight方法 设置头部IK权重
//设置 LookAt 权重。
//weight:LookAt全局权重0~1
//bodyWeight:LookAt时身体的权重0~1
//headWeight:LookAt时头部的权重0~1
//eyesWeight:LookAt时眼睛的权重0~1
//clampWeight:0表示角色运动时不受限制,1表示角色完全固定无法执行LookAt,0.5表示只能够移动范围的一半
animator.SetLookAtWeight(1, 1f, 1f);
//Animator的SetLookAtPosition方法 设置头部IK看向位置
//设置 LookAt 位置。
animator.SetLookAtPosition(pos.position);
//Animator的SetIKPositionWeight方法 设置IK位置权重
//设置反向动力学目标的转换权重(0 = 在反向动力学前的原始动画处,1 = 在目标处)。
animator.SetIKPositionWeight(AvatarIKGoal.RightFoot, 1);
//Animator的SetIKRotationWeight方法 设置IK旋转权重
//设置反向动力学目标的旋转权重(0 = 在反向动力学前旋转,1 = 在反向动力学目标处旋转)。
animator.SetIKRotationWeight(AvatarIKGoal.RightFoot, 1);
//Animator的SetIKPosition方法 设置IK对应的位置
//设置反向动力学目标的位置。
animator.SetIKPosition(AvatarIKGoal.RightFoot, pos2.position);
//Animator的SetIKRotation方法 设置IK对应的角度
//设置反向动力学目标的旋转。
animator.SetIKRotation(AvatarIKGoal.RightFoot, pos2.rotation);
#endregion
}
private void OnAnimatorMove()
{
}
}
62.3 练习题
在之前练习题的基础上,实现左右旋转鼠标通过IK控制角色的部分旋转
思路是设置一个头的点,从头的点延伸出一个方向向量,移动鼠标时让方向向量乘上一个四元数,作为要看的对象。
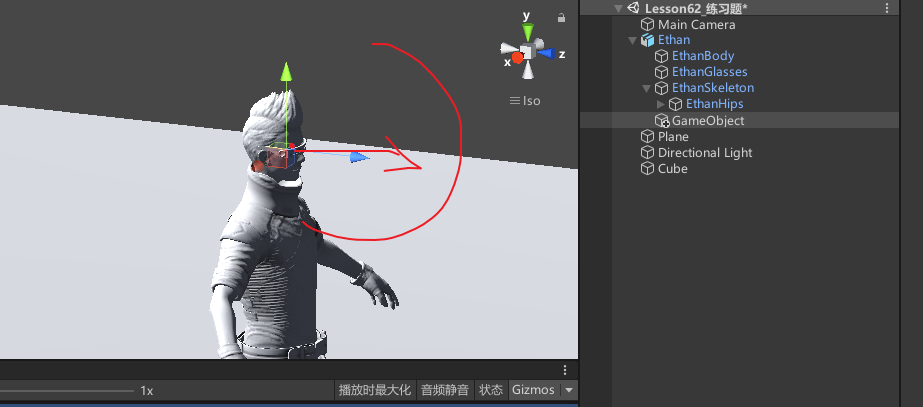
对层级设置好启用IKPass
关联头部位置。Update中得到鼠标的XY旋转,在OnAnimatorIK中通过四元数设置
// 存储机器人头部的 Transform 组件
public Transform headPos;
// x 方向鼠标旋转了多少角度
private float changeAngleX;
// y 方向鼠标旋转了多少角度
private float changeAngleY;
// Update 函数在每帧都会执行,用于检测用户输入并响应
void Update()
{
// 通过鼠标的移动来控制角色的部分旋转。将 changeAngleX 和 changeAngleY 累加相应的值,并使用 Mathf.Clamp 函数限制旋转角度不超过一定范围。
changeAngleX += Input.GetAxis("Mouse X");
changeAngleX = Mathf.Clamp(changeAngleX, -30, 30);
changeAngleY += Input.GetAxis("Mouse Y");
changeAngleY = Mathf.Clamp(changeAngleY, -30, 30);
}
// OnAnimatorIK 函数在每帧进行 IK 计算,用于实现鼠标控制角色的部分旋转
private void OnAnimatorIK(int layerIndex)
{
// 调用 SetLookAtWeight 函数,设置头部的权重。
animator.SetLookAtWeight(1, 1, 1);
// 通过四元数计算出头部的朝向,并调用 SetLookAtPosition 函数,将头部的朝向赋值给机器人的 Animator 组件进行控制。
//计算方向向量乘上x旋转四元数的位置
Vector3 pos = Quaternion.AngleAxis(changeAngleX, Vector3.up) * (headPos.position + headPos.forward * 10);
//接着再乘上y旋转四元数的位置
pos = Quaternion.AngleAxis(changeAngleY, Vector3.right) * pos;
//看向位置
animator.SetLookAtPosition(pos);
}
62.4 练习题代码
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class Lesson62_练习题 : MonoBehaviour
{
#region 练习题一
// 在之前练习题的基础上,实现左右旋转鼠标通过 IK 控制角色的部分旋转
// 存储机器人动画组件的变量
private Animator animator;
// 存储机器人头部的 Transform 组件
public Transform headPos;
// x 方向鼠标旋转了多少角度
private float changeAngleX;
// y 方向鼠标旋转了多少角度
private float changeAngleY;
// Start 函数在脚本挂载时执行一次,用于获取机器人上的 Animator 组件
void Start()
{
animator = this.GetComponent<Animator>();
}
// Update 函数在每帧都会执行,用于检测用户输入并响应
void Update()
{
// 根据用户输入的水平方向左右键和垂直方向上下键,调用 SetFloat 函数,切换机器人的奔跑和后退动画
animator.SetFloat("x", Input.GetAxis("Horizontal"));
animator.SetFloat("y", Input.GetAxis("Vertical"));
// 如果按下 K 键,调用 SetTrigger 函数,播放机器人开火动画。
if (Input.GetKeyDown(KeyCode.K))
animator.SetTrigger("Fire");
// 通过鼠标的移动来控制角色的部分旋转。将 changeAngleX 和 changeAngleY 累加相应的值,并使用 Mathf.Clamp 函数限制旋转角度不超过一定范围。
changeAngleX += Input.GetAxis("Mouse X");
changeAngleX = Mathf.Clamp(changeAngleX, -30, 30);
changeAngleY += Input.GetAxis("Mouse Y");
changeAngleY = Mathf.Clamp(changeAngleY, -30, 30);
}
// OnAnimatorIK 函数在每帧进行 IK 计算,用于实现鼠标控制角色的部分旋转
private void OnAnimatorIK(int layerIndex)
{
// 调用 SetLookAtWeight 函数,设置头部的权重。
animator.SetLookAtWeight(1, 1, 1);
// 通过四元数计算出头部的朝向,并调用 SetLookAtPosition 函数,将头部的朝向赋值给机器人的 Animator 组件进行控制。
//计算方向向量乘上x旋转四元数的位置
Vector3 pos = Quaternion.AngleAxis(changeAngleX, Vector3.up) * (headPos.position + headPos.forward * 10);
//接着再乘上y旋转四元数的位置
pos = Quaternion.AngleAxis(changeAngleY, Vector3.right) * pos;
//看向位置
animator.SetLookAtPosition(pos);
}
#endregion
}
转载请注明来源,欢迎对文章中的引用来源进行考证,欢迎指出任何有错误或不够清晰的表达。可以在下面评论区评论,也可以邮件至 785293209@qq.com

