54.性能优化-CPU-物理-PhysicsDebugger窗口Filtering和Rendering
54.1 知识点
Filtering(过滤)页签的作用
Filtering 用于控制哪些物理对象在 Scene 视图中显示。
当场景物体很多时,只显示与调试相关的碰撞体、刚体,避免视图杂乱。
Filtering(过滤)页签的参数含义
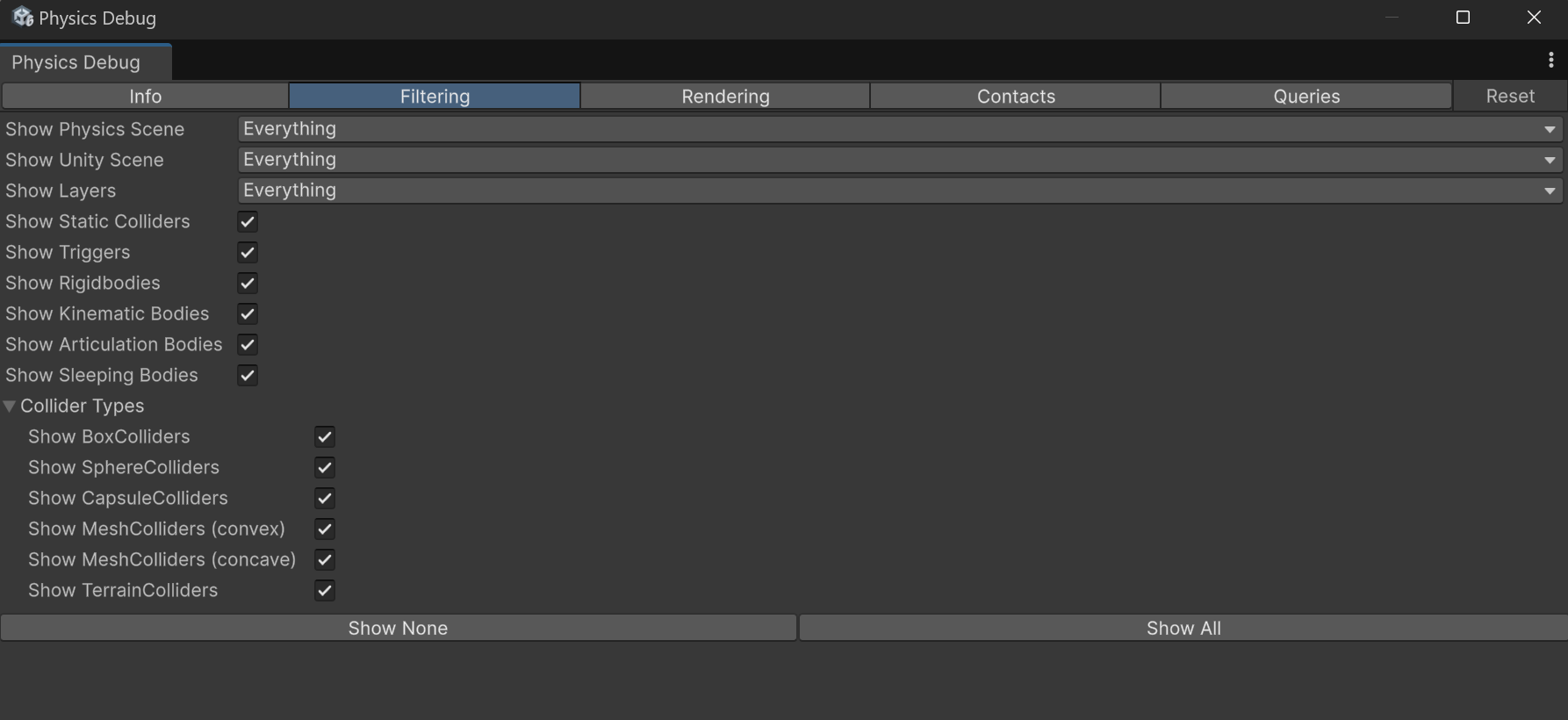
场景相关
Show Physics Scene(显示物理场景)
选择要调试的物理场景。Unity 支持多物理场景(例如多线程模拟、子场景),可在此切换。Show Unity Scene(显示 Unity 场景)
选择对应的 Unity 场景(Scene),通常一个物理场景对应一个 Unity 场景。
Layer 过滤
Show Layers(显示层级)
根据 Layer 来过滤,只显示特定 Layer 的物理对象(例如只显示 Player、Enemy)。
按物体类别过滤
Show Static Colliders(显示静态碰撞器)
显示静态碰撞体(无 Rigidbody 的 Collider,常见于地形、建筑)。Show Triggers(显示触发器)
显示触发器 Collider(isTrigger = true的碰撞体)。Show Rigidbodies(显示刚体)
显示所有刚体(带 Rigidbody 的物体)。Show Kinematic Bodies(显示运动学刚体)
显示运动学刚体(isKinematic = true的 Rigidbody),不受物理模拟影响但能驱动物理。Show Articulation Bodies(显示关节体)
显示 ArticulationBody 组件(主要用于机器人/机械臂模拟)。Show Sleeping Bodies(显示休眠的刚体)
显示处于 Sleep 状态的刚体(不再参与模拟)。
按碰撞体类型过滤
Show BoxColliders(显示盒状碰撞器)Show SphereColliders(显示球状碰撞器)Show CapsuleColliders(显示胶囊碰撞器)Show MeshColliders (convex)(显示凸型网格碰撞器)Show MeshColliders (concave)(显示凹型网格碰撞器,仅用于静态物体)Show TerrainColliders(显示地形碰撞体)
全局开关
Show None(一键全部隐藏)
取消选中所有项目,隐藏所有物理对象。Show All(一键全部显示)
显示所有物理对象。
调试建议
这个界面相当于物理可视化过滤器,用于在复杂场景中筛选出需要调试的对象。
示例:快速筛选思路
// 伪代码:只调试 Player 与 Enemy 的碰撞
// 1. Show Layers 选择 Player、Enemy
// 2. 关闭无关类别,例如 Triggers 与 TerrainColliders
Rendering(渲染)页签的作用
Rendering 用于调整物理调试可视化的显示方式,帮助显示更清晰。
例如在复杂场景中,为不同对象分配不同颜色。
Rendering(渲染)页签的参数含义

颜色设置相关
Static Colliders(静态碰撞器)
设置无刚体碰撞器的显示颜色。- Triggers
设置触发器碰撞体(isTrigger = true)显示颜色。 - Rigidbodies
设置普通刚体显示颜色。 - Kinematic Bodies
设置运动学刚体(isKinematic = true)显示颜色。 - Articulation Bodies
设置关节刚体(ArticulationBody,用于机器人/机械臂)显示颜色。 - Sleeping Bodies
设置处于 Sleep 状态的刚体显示颜色。
渲染参数
Variation(变化)
给不同物体随机增加颜色偏移,数值越大差异越明显。Transparency(透明度)
控制调试显示的透明度(0 = 全不透明,1 = 全透明)。
一般取中间值便于观察重叠物体。Force Overdraw(强制叠加绘制)
勾选后强制所有物体在 Scene 视图中渲染,即使被遮挡。
类似“透视模式”,避免物体被挡住看不到。View Distance(视距)
可视化的最大显示距离,超过距离不绘制 Gizmo,减少杂乱与开销。Terrain Tiles Max(地形瓦片绘制最大值)
针对 Terrain Collider 的优化,限制一次最多绘制的地形瓦片数。
Gizmos settings(绘制小工具设置)
Constant screen size(固定屏幕大小)
勾选后 Gizmo(如质心点、碰撞体线框)保持固定屏幕大小,不随镜头远近缩放。
便于调试小物体时避免 Gizmo 过小看不清。Inertia Tensor scale(惯性张量比例)
控制惯性张量 Gizmo 的缩放,调大可更清晰观察主惯性轴方向。
调试建议
这个界面是调试颜色与细节显示的设置区,方便更直观地观察物理对象变化。
54.2 知识点代码
Lesson54_性能优化_CPU_物理_PhysicsDebugger窗口Filtering和Rendering.cs
public class Lesson54_性能优化_CPU_物理_PhysicsDebugger窗口Filtering和Rendering
{
#region 知识点一 Filtering(过滤)页签的作用
//控制哪些物理对象会在 Scene 视图中显示
//用途:
//当场景里物体太多时,只显示与调试相关的碰撞体、刚体,避免视图杂乱
#endregion
#region 知识点二 Filtering(过滤)页签的参数含义
//思维导图中讲解
#endregion
#region 知识点三 Rendering(渲染)页签的作用
//调整物理调试可视化的显示方式
//用途:
//让调试显示更清晰
//例如在复杂场景中,给不同对象分配不同颜色
#endregion
#region 知识点四 Rendering(渲染)页签的参数含义
//思维导图中讲解
#endregion
}
转载请注明来源,欢迎对文章中的引用来源进行考证,欢迎指出任何有错误或不够清晰的表达。可以在下面评论区评论,也可以邮件至 785293209@qq.com

